Altimeters¶
Lidar¶
The integration between Veronte BCS and a lidar is performed using a variety of interfaces depending on the lidar device. The most common interfaces are I2C or analog although serial or CAN bus can also be used if the lidar is compatible.
I2C lidar¶
Connect the lidar following the pinout provided by the manufacturer and connect it to the BCS I2C bus following the Hardware installation - Pinout section of the BCS Hardware Manual.
In this case it is not needed to transform the lidar readings, the readings will be reported directly in the selected lidar distance variable.
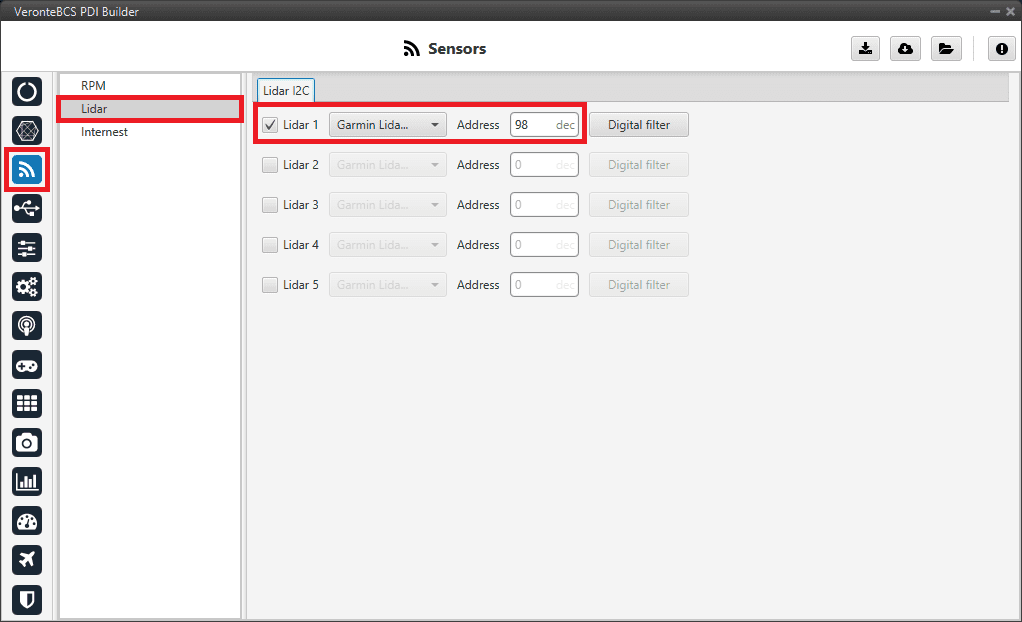
Go to Sensors menu \(\rightarrow\) Lidar section.
Enable Lidar 1
Select the desired Lidar from the drop-down menu
Set the I2C address
More information on the available lidar options can be found in the Lidar section of this manual.
I2C Lidar¶
Warning
I2C address will be different for different devices make sure to define it properly by checking the manufacturer documentation.
Using lidar readings¶
Once the information provided by a lidar sensor is stored in a system variable as Lidar Distance via an ADC reading, I2C, serial or CAN, the user has to set how this data will be considered. Common uses are: to consider the lidar data as external sensor or to trigger an action based on a predefined event.
Altimeter configuration: The following operation must be configured in the Block Programs menu to consider the lidar measurement as an EKF input.
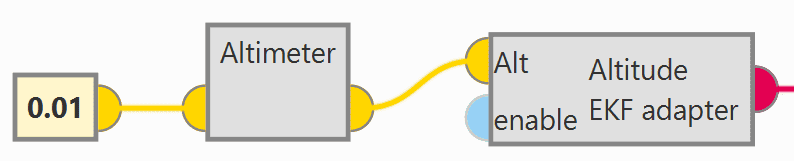
Altimer connection - Block Programs¶
The Lidar Distance variable where the lidar measurement is stored must be selected. In this example, Lidar 1 Distance has been used:
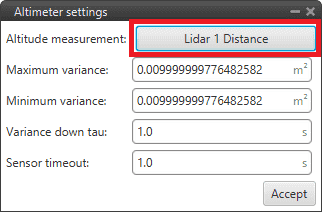
Altimer sensor configuration - Block Programs¶
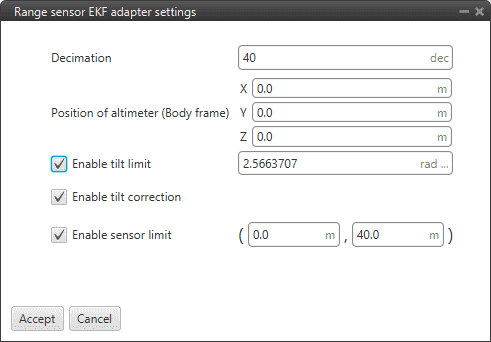
Altitude EKF adapter configuration - Block Programs¶
Automation: This automation will trigger a change of phase, Flare phase, when the aircraft is landing and at 5 m AGL.
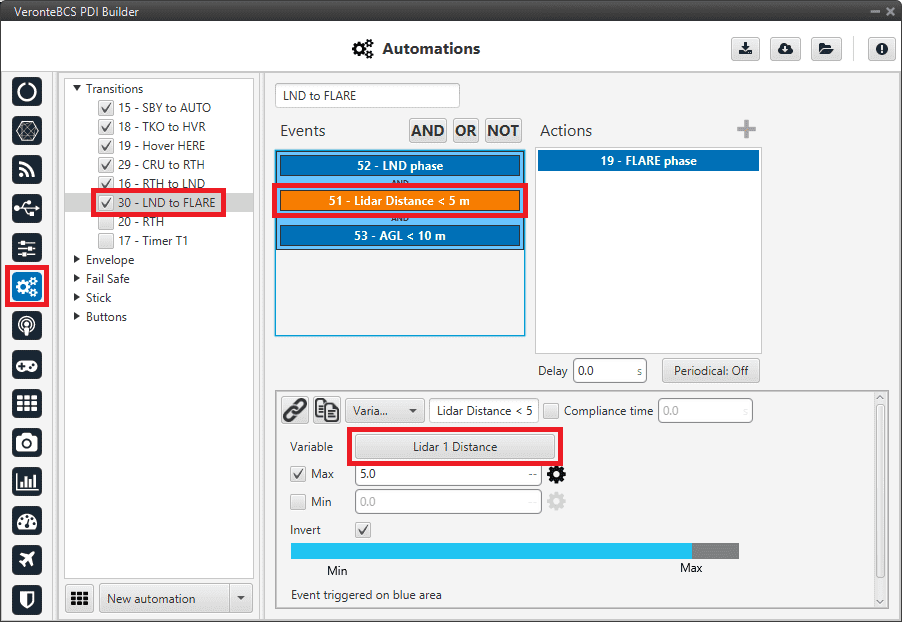
Lidar automation example¶
For more information on automations, see Automations section.
Radar¶
Radar altimeters are common devices on aircrafts.
Smartmicro CAN Radar¶
The following explanation corresponds to the integration of the Smartmicro CAN Radar. For more information on the Smartmicro Radar - Altimeter datasheet, the user can go to:
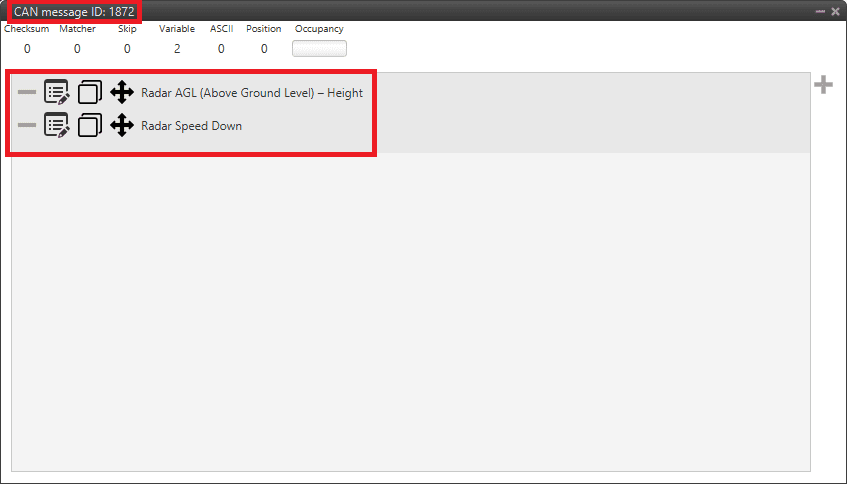
These settings will allow BCS to read out via CAN A the radar altimeter readings, in particular AGL and vertical speed.
Note
In the datasheet the user can access the complete protocol of the device.
Go to Input/Output menu \(\rightarrow\) CAN Setup section \(\rightarrow\) Mailboxes tab.
Configure the CAN A baudrate:
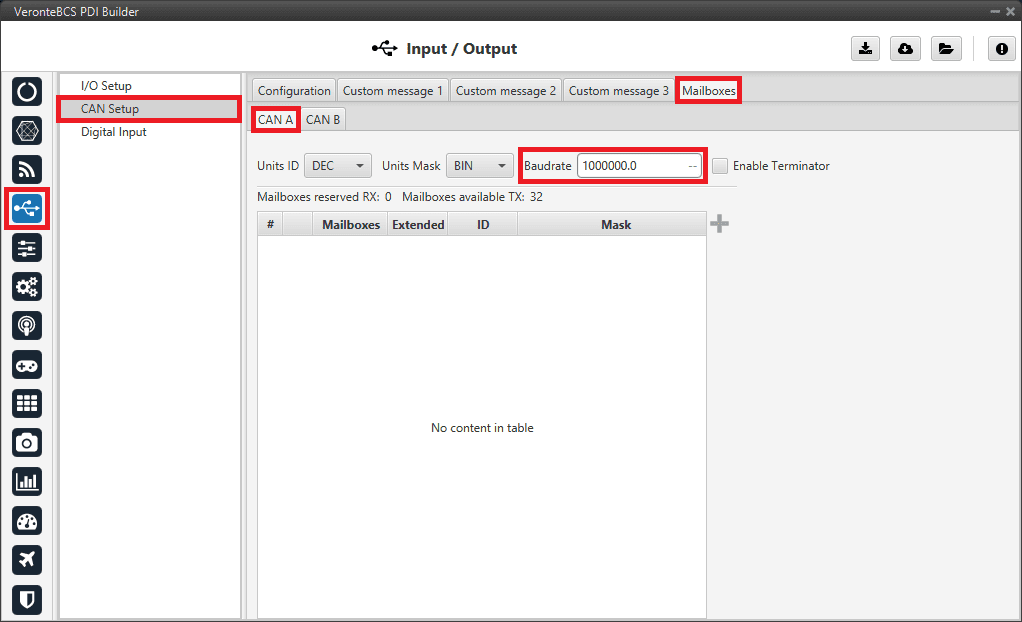
Baudrate configuration¶
Once the baudrate is set, go to Configuration tab.
Set an Input Filter to read from CAN A in Custom message 1, in this example Input Filter 3.
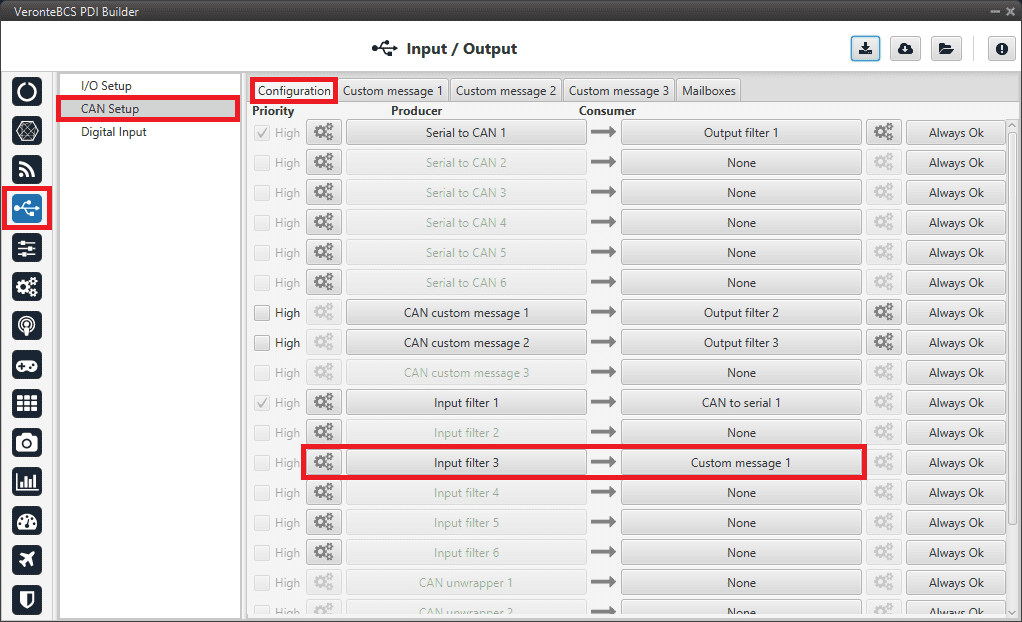
CAN Setup - Input Filter¶
CAN Setup - Input Filter configuration¶
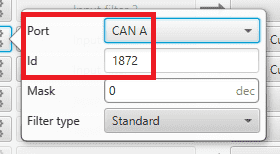
After specifying that Custom message 1 will receive the data from CAN A, go to Mailboxes tab.
Configure CAN A mailboxes for CAN ID message: 1872.
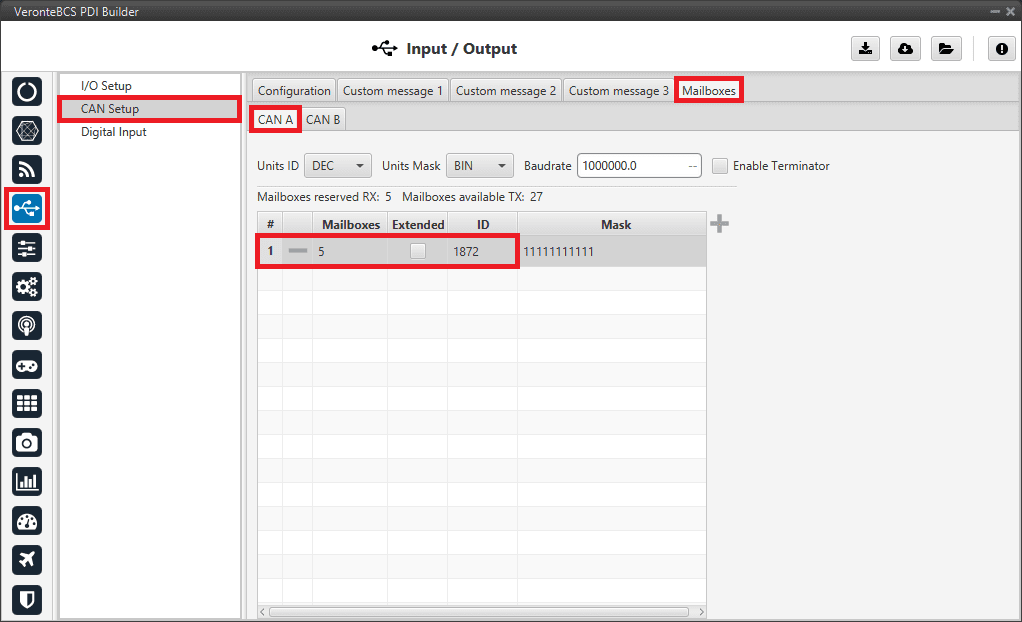
Mailboxes configuration¶
Go to Custom message 1 tab.
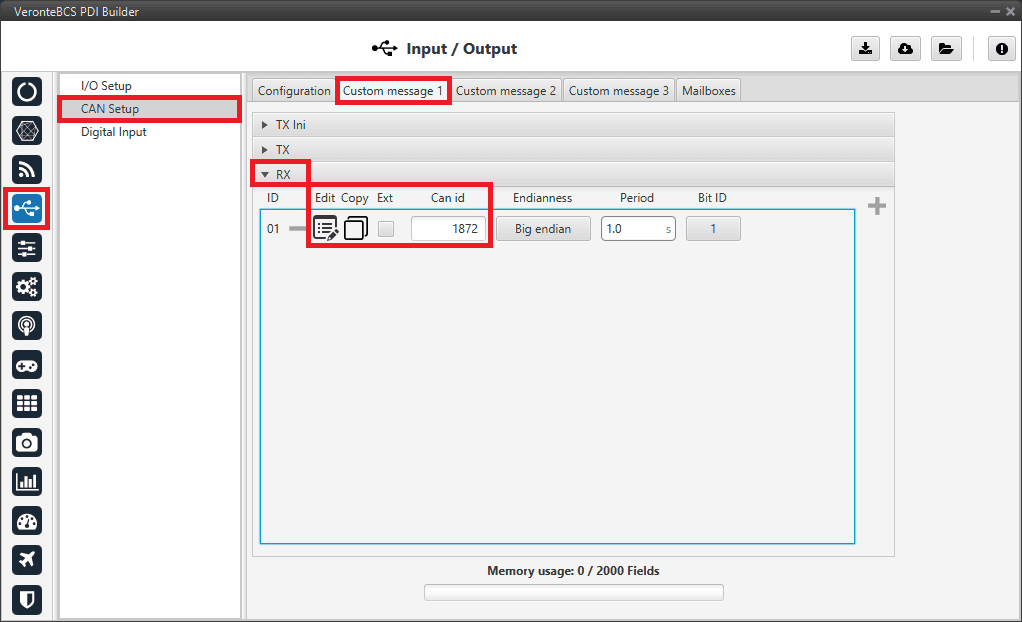
For more details on CAN configuration see CAN Setup section.
Note
CAN ID messages and messages content will change for different Radar altimeters. Check the documentation of your device for further details.